Laser Scanner Stabilizer
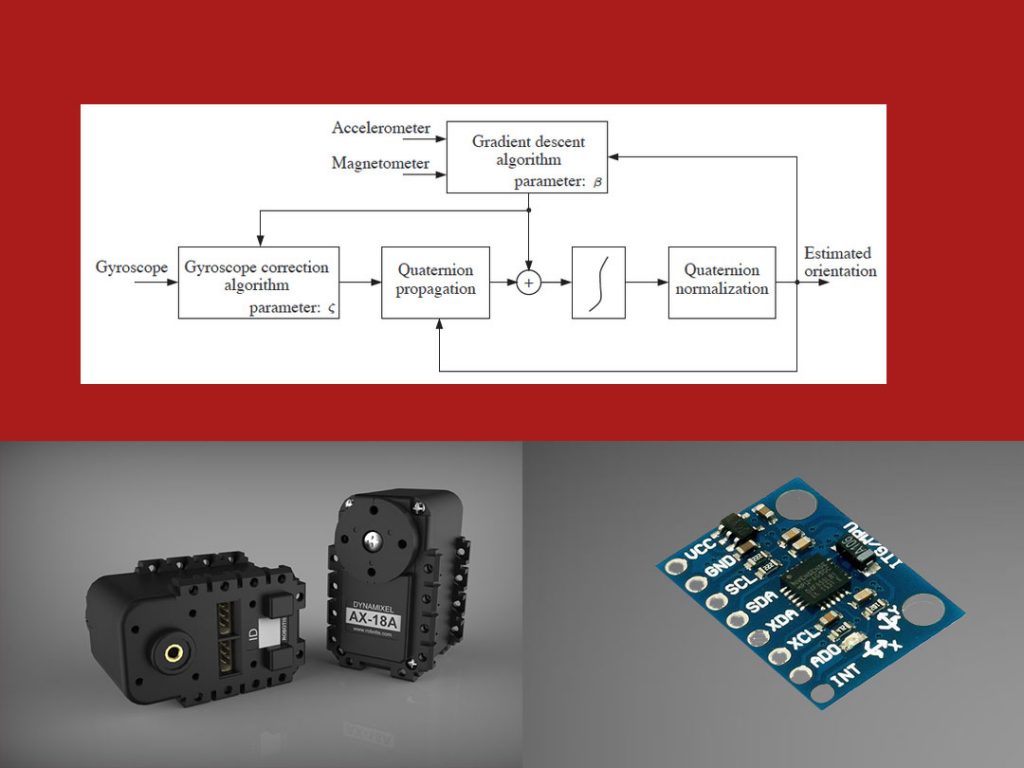
For stabilizing the laser scanner, acceleration data was collected by MPU6050. Mahony algorithm was implemented on MCU to process the raw data and calculate the angles. Roll and pitch angles were automatically modified by two servo motors. For taking a 2D map from the area and avoiding yaw shifts CMPS sensor was used which works with Earth’s magnetic field.